
(iii) Describe in brief the functioning of push broom scanner.
Answer. The number of detectors used in push broom scanners is equal to the number found by dividing the sensor’s swath by the size of the spatial resolution. Each detector in a push broom scanner is linearly arranged and captures the energy reflected by a ground cell (pixel) with dimensions of 20 metres from a nadir’s perspective. For example, the swath of High- Resolution Visible Radiometer – 1 (HRVR -1) of the French remote sensing satellite SPOT is 60 km, and the spatial resolution is 20 metres. If we divide 60 km × 1000 metres/20 metres, we get a number of 3000 detectors that are deployed in SPOT HRV – 1 sensor.
Question.3. Answer the following questions in about 125 words.
(i) Describe the operation of a whiskbroom scanner with the help of a diagram. Explain how it is different from push broom scanner.
Answer. The whiskbroom scanners consist of a single detector and a rotating mirror. In order to produce pictures in a large number of small spectral bands spanning the visible to middle infrared sections of the spectrum, the mirror is angled in such a way that when it completes a revolution, the detector sweeps throughout the field of vision between 90° and 120°. The scanner’s total Field of View (IFOV) refers to the whole area covered by the oscillating sensor. The sensor’s optical head is always positioned at a certain dimension known as the Instantaneous Field of View while scanning the whole field (IFOV).
- In a whiskbroom scanner, a single mirror is used to reflect light onto a single detector. The mirror moves back and forth to collect measurements from one pixel in the image at a time, whereas, in a push broom scanner, a line of detectors is arranged perpendicular to the flight direction. The image is collected one line at a time, with all of the pixels in a line measured simultaneously.
- A push broom scanner receives a stronger signal than a whiskbroom scanner because it looks at each pixel area for a long time.
- Push broom scanner is more sensitive than whiskbroom scanner. So it is needed to calibrate perfectly.
(ii) Identify and list the changes that can be observed in the vegetation of Himalayas (Fig. 6.9).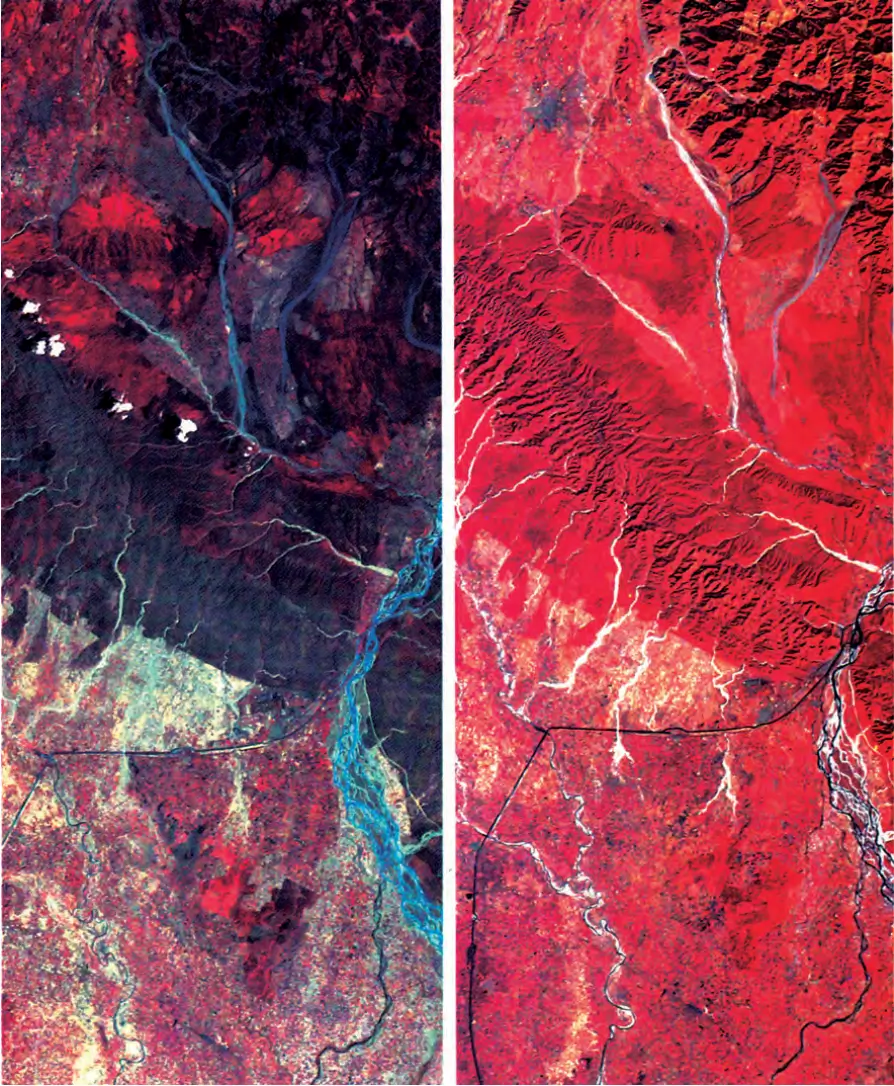
The red patches in the May image refer to Coniferous vegetation. In the November image, the additional red patches refer to Deciduous plants, and the light red colour is related to the crops.


